 [1]Jestli mi někdo bude tvrdit, že měl v éře koronavirové fůru času a hlavně, že se mohl v klidu věnovat modelaření, tak mu asi řeknu něco od plic. No, možná, ale pokud neměl za zadkem manželku… Přesto všechno jsem si po více než roce našel čas na dokončení digitalizace německé „dresiny“ nesoucí označení KLV 53. Typickým pro toto vozidlo je, že nejspíš nejezdilo na kolejích Česka ani Slovenska a asi ani u soukromých dopravců. U nás známe z dřívější doby především drezíny TATRA, v současnosti pak vozidla MUV 69, neboli motorové univerzální vozíky. Model MUV 69 v měřítku N v jezdící verzi popsal Jirka Kubík – ZDE [2] a ZDE [3].
[1]Jestli mi někdo bude tvrdit, že měl v éře koronavirové fůru času a hlavně, že se mohl v klidu věnovat modelaření, tak mu asi řeknu něco od plic. No, možná, ale pokud neměl za zadkem manželku… Přesto všechno jsem si po více než roce našel čas na dokončení digitalizace německé „dresiny“ nesoucí označení KLV 53. Typickým pro toto vozidlo je, že nejspíš nejezdilo na kolejích Česka ani Slovenska a asi ani u soukromých dopravců. U nás známe z dřívější doby především drezíny TATRA, v současnosti pak vozidla MUV 69, neboli motorové univerzální vozíky. Model MUV 69 v měřítku N v jezdící verzi popsal Jirka Kubík – ZDE [2] a ZDE [3].
Předloha1) pro model KLV 53 v měřítku N od HobbyTrain
Malé, ale současně dostatečně hmotné drážní vozidlo, nesoucí označení KLV 53, nakupují německé dráhy od roku 1963 od společnosti Schöma2). Více než 800 těchto servisních vozidel je nepostradatelných na německých kolejích, ale i jinde v zahraničí. Pozdější výrobu zajišťovalo několik dalších německých vagonek, některé na vozidle provedly i další vylepšení. Používají se při stavbě, opravách a servisu železničních systémů.
Označení KLV 53 odpovídá systému označení Bundesbahn pro malá vozidla: Kleinwagen mit Verbrennungsmotor; číslo 53 se vztahuje k vývojové řadě těchto typů vozidel (předešlé řady KLV 50, 51 a 52). Konstrukční rozdíly, týkající se např. nakládacího jeřábu či brzdového systému, se označují tříciferným označením mezi 530 a 538.
Dvounápravové tažné vozidlo má délku 6 370 mm, výšku 3 030 mm a šířku 2 400 mm nebo 2 600 mm. Rozvor náprav je 3 750 mm, standardní rozchod je 1 435 mm. Průměr kol je 700 mm. Použitelná hmotnost je 8 t. Vozidlo pohání dieselový 4, nebo 6ti válcový motor chlazený vzduchem, max. rychlost vozidla je 70 km/hod. Mechanický přenos výkonu od motoru na kola zajišťuje 4, nebo 5ti stupňová převodovka. Vozidlo má kotoučové brzdy ovládané pneumaticky a může být vybaveno několika typy nástaveb: např. nakládacími jeřáby různých typů s řadou přídavných zařízení na rameně jeřábu, zařízením na odstraňování náletových křovin a plevelů, sněžnými pluhy a frézami, zvedací klecí pro obsluhu trolejí, zařízením pro svařování kolejnic atd. A také přívěsnými vozíky.
Typickým pro vozidlo KLV 53 je velká a vyhřívaná kabina, která splňuje potřebný standard pro traťové dělníky v případě nepřízně počasí.
Charakteristický je pro KLV 53 žlutý nátěr. Některá vozidla byla po prodeji soukromým dopravcům modernizována nebo jinak upravena.
 [4] [4] |
 [5] [5] |
 [6] [6] |
 [7] [7] |
Obr. 1 – 4 – Různá provedení KLV 53; zdroj: internet
.
Model KLV 53 Rottenkraftwagen
Model KLV 53 Rottenkraftwagen od HobbyTrain v měřítku N je skvostný výrobek, byť „ošizený“ o některé funkční detaily (světla). Právě to může lákat modeláře k jeho vylepšení. Podle dokonalého datalistu se i nemožné zdá být snadno realizovatelné. Opak je však pravdou. Pořád je třeba mít na vědomí, že v N-ku se jedná o velmi maličký model.
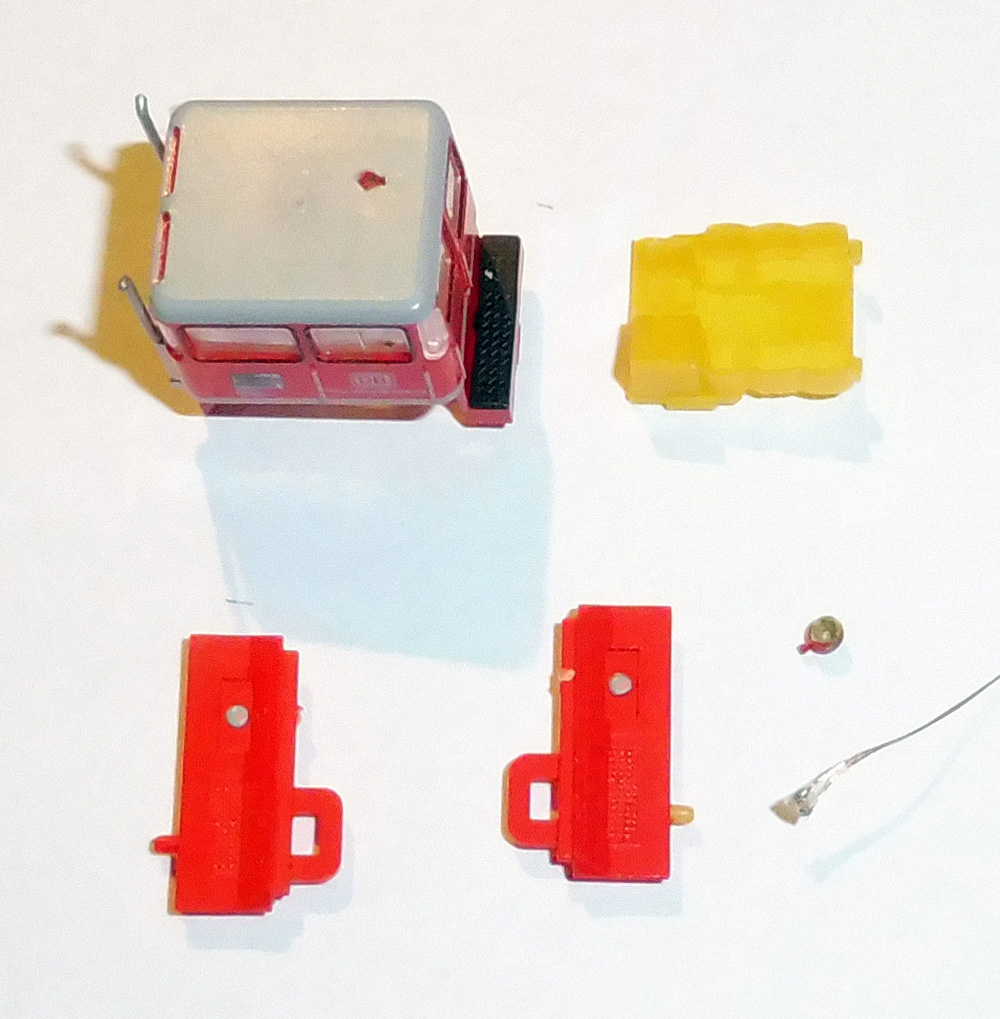
Dlužno dodat, že v měřítku N výrobce nabízí (nabízel) nemotorizovanou a motorizovanou verzi modelu. Nevím jak teď, ale svého času si bylo možné samostatně koupit jen tažné vozidlo (mám ho ve žluté barvě). Rozhodně nemohlo samostatně jezdit, protože nemělo motor. Ten je u tohoto měřítka instalován v přívěsném vozíku. Jenže, podle mých zkušeností, nebylo možné si samotný přívěsný vozík (s motorem a převody) dokoupit. Takže, nemotorizované tažné vozidlo se dalo tak akorát dovybavit součástkou na sběr napájení a instalovat v něm světla nebo maják. Pohybovat se samostatně na kolejích ale nemohlo.
Možné bylo a stále je pořídit si kompletní verzi modelu – tj. soupravu tažné vozidla plus motorizovaného přívěsného vozíku.
 [8] [8] |
 [9] [9] |
 [10] [10] |
 [11] [11] |
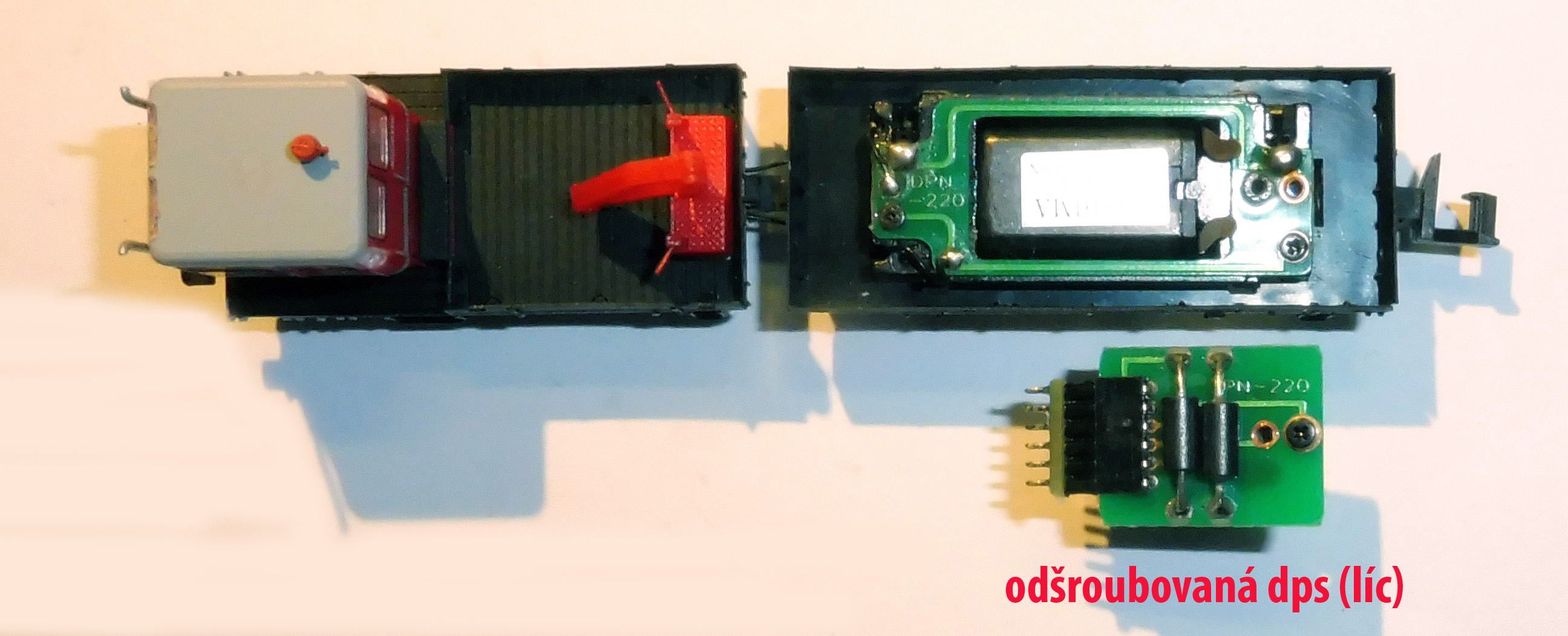
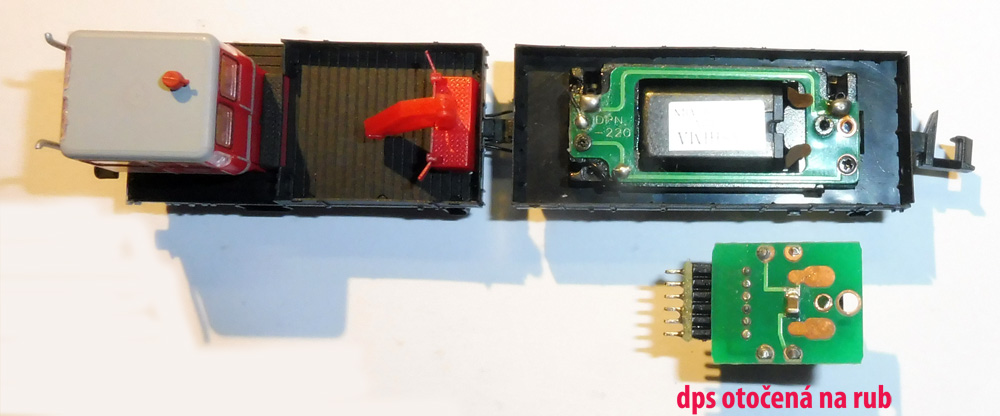
Obr. 5 – 8 – Souprava modelu KLV 53 v měřítku N; lícová a rubová strana DPS po jejich odšroubování
.
Takže, jak už bylo uvedeno, motorizace je u modelu KLV 53 v měřítku N vyřešena umístěním motoru v přívěsném vozíku. Tažné vozidlo i přívěs jsou opatřeny fosforbronzovými snímacími plíšky, takže napájení se sbírá ze čtyř pojezdových kol na každé straně. Obě vozidla soupravy jsou spojená nerozebíratelným spřáhlem a propojená vodiči, čímž se zlepšují jízdní vlastnosti modelu na výhybkách atd.
Pod snímacím krytem přívěsného vozíku je malá (oboustranná) deska plošných spojů (dále jen „DPS“), na které je připájen 6ti pinový konektor NEM 651 pro dodatečné připojení lokomotivního dekodéru. Z výroby je v konektoru zasunuta analogová propojka3). Na téže DPS jsou pak ještě dvě součástky (pravděpodobně diody), další součástka (zespodu DPS) překlenuje přívody k motoru.
Jestli se někdo domnívá, že digitalizace modelu je jednoduchá záležitost, že stačí vyjmout analogovou propojku, místo ní vložit dekodér – a jedem! –, tak ten je na velkém omylu. Nevím, ale takto jednoduše se mi ještě digitalizaci žádného modelu nepodařilo uskutečnit. A asi nejsem sám. Ale o tom dále.
Ona DPS je přišroubovaná dvěma mikro-šroubky se samořezným závitem do druhé DPS (dále jen „rámová DPS“). Označení jsem odvodil od jejího připevnění (dalšími dvěma šroubky) k rámu přívěsného vozíku, zhotoveného ze zinkové slitiny. V rámu jsou pak zespodu uloženy hnací nápravy s ozubeným kolečkem, které roztáčí motor Mashima uložený v lůžku uprostřed rámu. Oba konce jeho osy jsou opatřené šnekovými koly. Plíšky přivádějící napájení do motoru se opírají o plošky na rubu (horní) DPS.
Rámová DPS má na pravé podélné straně dva napájecí vývody v podobě plíšků, které se opírají o vnitřní stranu (okolky) pojezdových kol. Druhý „pól“ napájení je řešen přes kostru, resp. osu náprav. Kolečka na pravé straně jsou proto izolovaná od osy. Stejné to je i s kolečky v tažném vozidle.
Osy dvojkolí tažného vozidla jsou k rámu přidržovány pomocí dvou plastových příložek s čepy; u přívěsného vozíku jsou dvojkolí s ozubenými koly přidržovány podobnými příložkami, ale ty jsou jištěny šroubky. Pozor při manipulaci s dvojkolími, aby při zpětné montáži byly správně usazené – tj. odizolovanými kolečky na pravou stranu!
Napájení sbírané z kolejí v hnacím vozidle je od snímacích plíšků přivedeno pomocí dvou tenkých vodičů na rámovou DPS v přívěsu, kde jsou připájené.
Jak ještě bude uvedeno, zdrojem neskutečné závady při zpětné montáži digitalizovaného modelu byl šroubek s maličkou trubičkou (obr.), který se má zašroubovat do rámové DPS. Toto místo považuji za výrobcem konstrukčně nezvládnuté.
Plán úprav modelu a realizace
Mám rád výzvy, které představují řešení (téměř) nemožného. V daném případě se jednalo o osvětlení vozidla a celkovou digitalizaci. Osvětlení jsem si už vyzkoušel u nemotorizované verze modelu.
Výrobce model neosvětlil. Dodává k němu pouze plastové imitace čtyř obrysových světel pro tažné vozidlo a dvou pro přívěsný vozík (kromě dalších plastových „cingrlátek“ – brzdová kola, hydraulické podpěry, jeřáb s podstavcem aj.). Ona světla se mají vložit a (asi) přilepit do otvorů předpřipravených v karoserii modelu. Už jenom to, že světla mají velikost čtvrtiny špendlíkové hlavičky, je výzva!
Co takhle ty imitace světel provrtat a instalovat do nich LED SMD 0402? K LEDkám připájet tenoučké lakované vodiče a ty přes odpor připájet k světelným vývodům dekodéru (bílému a žlutému)? A když už, tak přece každá pořádná drezína má blikající maják, ne?
Tak přesně tohle jsem řešil ještě před tím, než jsem se začal trápit s obyčejným zasunutím dekodérů do konektoru.
Což o to, zkušenosti s pájením tenkých lakovaných drátků k LEDkám té nejmenší velikosti mám bohaté. Výslednost cca 3:5. :-)Rozhodl jsem se proto (po prostudování osvětlení na řadě originálních KLV 53, kde se ukázalo, že „každá ves, jiný pes“), že na tažném vozidle budou dopředu svítit dvě světla bílá, červená pak budou až vzadu na přívěsném vozíku. Všechna světla současně budou ovládána tlačítkem F0 na ovladači při jízdě vpřed i vzad, tzn. že všechna světla budou zapojena přes odpory na vývod bílého výstupu dekodéru (byť ve dvou větvích).
 [12] [12] |
 [13] [13] |
Obr. 9, 10 – Příprava světel z LED SMD 0402 dopředu a dozadu
.
Maják na střeše jsem původně chtěl konstruovat jako už mám v jiných modelech s využitím sériového zapojení „blikací“ LED a oranžové LED SMD 0402. Ale pak mne usměrnil můj dvorní poradce Honza Plutnar a vymyslel, že bude lepší koupit pro KLV 53 takový dekodér, který umí efekt blikajícího světla. Volba padla na levný dekodér Kuehn N0254). Zjednodušilo to tím konstrukci majáku uvnitř kabiny, kde jsem instaloval pouze oranžovou LED SMD 0402, jejíž světlo na střechu vede tenký světlovod schovaný ve smršťovací bužírce, aby světlo nevyzařovalo do okolí. Také tento obvod je chráněn odporem.
 [14] [14] |
 [15] [15] |
Obr. 11, 12 – Instalace LED SMD 0402 do černé smršťovací bužírky a do kabiny modelu coby maják
.
Bez použití ochranných diod je druhý „fous“ napájení LED SMD „vytažen“ z pravé koleje (jinak červený vývod dekodéru). Toto zapojení sice některým kolegům nevoní (a z výkladu Martina Pinty to i chápu), ale u N-ka to je normální a nikoho nepohoršuje. To že LEDky dostávají více zabrat je marginální.
Pod rám tažného vozidla jsem napravo a nalevo instaloval maličké DPS (zhotovené z odřezků kuprextitových desek s napařenými Cu pásky), na které jsem připájel odpory a přivedl k nim napájení z kolejí. Také jsou zde připájeny tenké drátky od LEDek.
 [16]
[16]
Obr. 13 – Maličké DPS instalované zespodu po bocích rámu tažného vozidla
.
Úprava DPS
Jak už jsem naznačil, digitalizace modelů opatřených od výrobce konektorem pro dekodér (NEM 651) nefunguje pouhou výměnou analogové propojky za dekodér.
Je zde několik úskalí: To nejtriviálnější spočívá ve správné stranové orientaci dekodéru s piny. Copak u dekodérů s barevnými drátky to je sranda, ale s šesti piny? Ne každý výrobce dekodéru dbá na označení PIN1. Prase aby se v tom vyznalo! Někdo tam plácne červenou tečku, někdo bílou, ale na rubu atd. Navíc, jak se pozná líc a rub dekodéru s piny? Naštěstí výrobce počítá s blbostí modelářů, a tak obvody jsou (asi) chráněné proti špatnému vložení dekodéru do konektoru. Opačné zasunutí dekodér obvykle přežije. To zaprvé.
Příklad? Prosím: Co se stalo mně s dekodérem N025 je hodně kuriózní. Jak přísně nabádá další učitel programování Karel Brejša, nejdříve je nutné dekodér řádně zkontrolovat na testovací stolici ESU. Stalo se. Naprogramoval jsem v něm základní CV (adresu, orientačně a světla) podle návrhu poradce – detaily později. Dekodér jsem vytáhl ze stolice ESU a zastrčil do konektoru v modelu. Nic! Model sice svítil jak blázen, ale nereagoval na tlačítka. Jasné – je tam obráceně. Ale jak to? Vždyť značky… No, značky? To co jsem považoval za červenou značku byl ve skutečnosti (zjištěno až pod lupou) červený proužek u maličké diody. Sotva patrná bílá tečka, vztahující se k PIN1, byla na opačné straně, ovšem na rubu dekodéru!! Zmátlo mne ale, že dekodér stejně nefungoval, za což zase mohl stržený závit pro prťavý šroubek – viz dále.
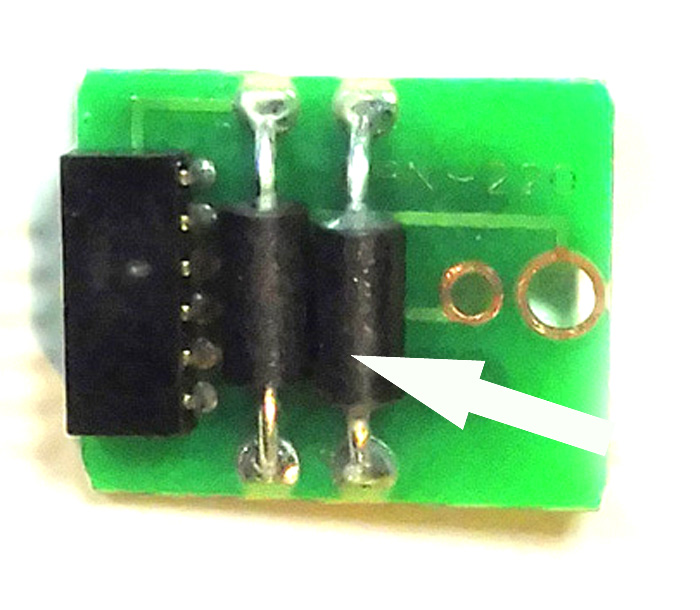
Zpátky k těm úskalím, které skýtá popisovaná DPS. Nevěřte prosím tomu, že na DPS jsou při digitalizaci nezbytné všechny ty „nadbytečné“ součástky. Možná nejsou nadbytečné pro analogový provoz, ale digitalismům nesvědčí. Doporučuji: Cvak, cvak, lépe však odpájet! A do prázdných otvorů naletovat spojky tak, aby správná elektricky vodivá cesta vedla od příslušného pinu konektoru k pravému a levému vývodu motoru a stejně tak k pravé a levé straně napájení z kolejí. To zadruhé.
 [17] [17] |
 [18] [18] |
Obr. 14, 15 – Označené součástky musí z DPS pryč
.
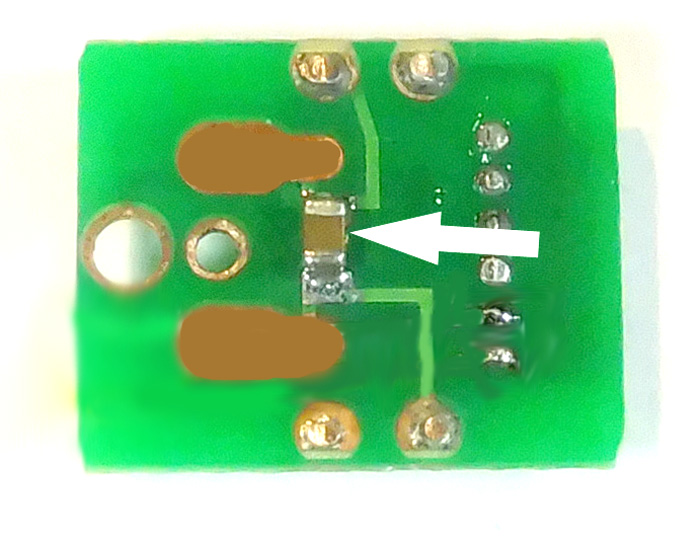
Třetím úskalím jsou šroubečky k upevnění malé DPS k rámu a k rámové DPS. Tak to byl horor, přátelé! Trvalo mi dva dny, než jsem přišel na to, proč na programovací stolici ESU dekodér běhá a v modelu ne. Až náhoda tomu chtěla, že jsem zjistil, že v mikro-otvoru v rámové DPS, do kterého se má zašroubovat mikro-šroubek přitahující DPS, došlo ke stržení závitu. Když jsem šroubek přitlačil jehlou, světla naskočila a motor zabral. Když jsem povolil přítlak, šmytec. Oprava závitu se podařila tradiční metodou. Kladívkem! Pomohlo poťukání na mosazné pouzdro, pod kterým je onen závit.
 [19]
[19]
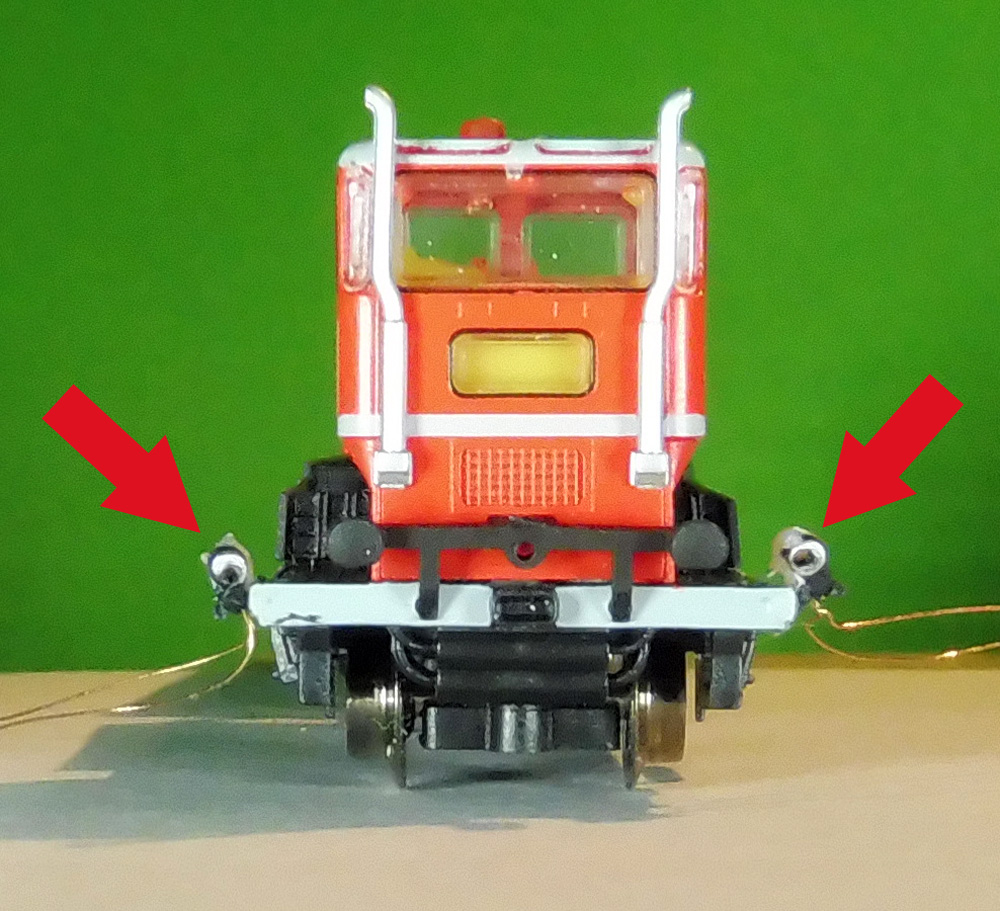
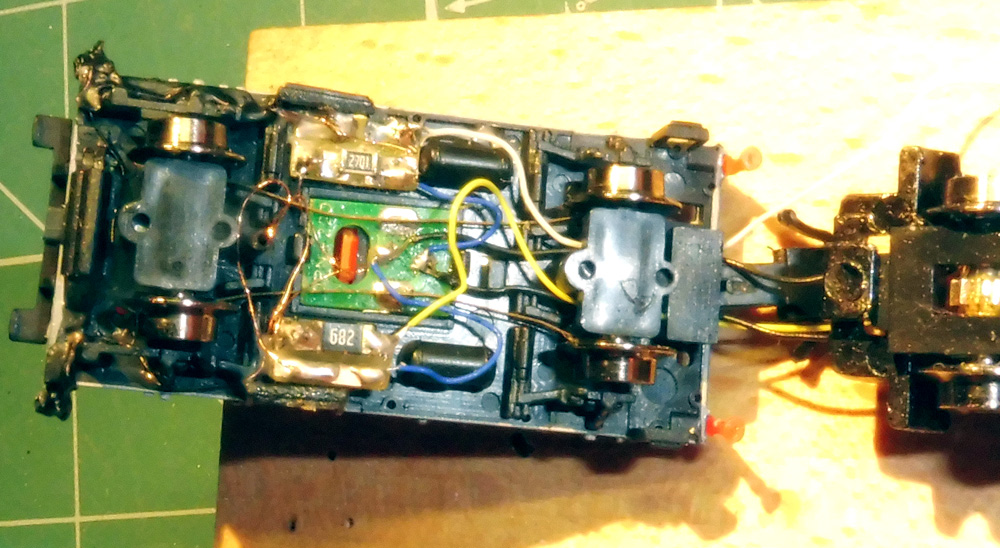
Obr. 16 – Žlutá šipka označuje šroubek, který mne potrápil; červená šipka směřuje ke kontaktům (s rezistorem), ke kterým byly následně připojeny zadní červená světla; zelená šipka ukazuje označení PIN1 na rubu dekodéru
.
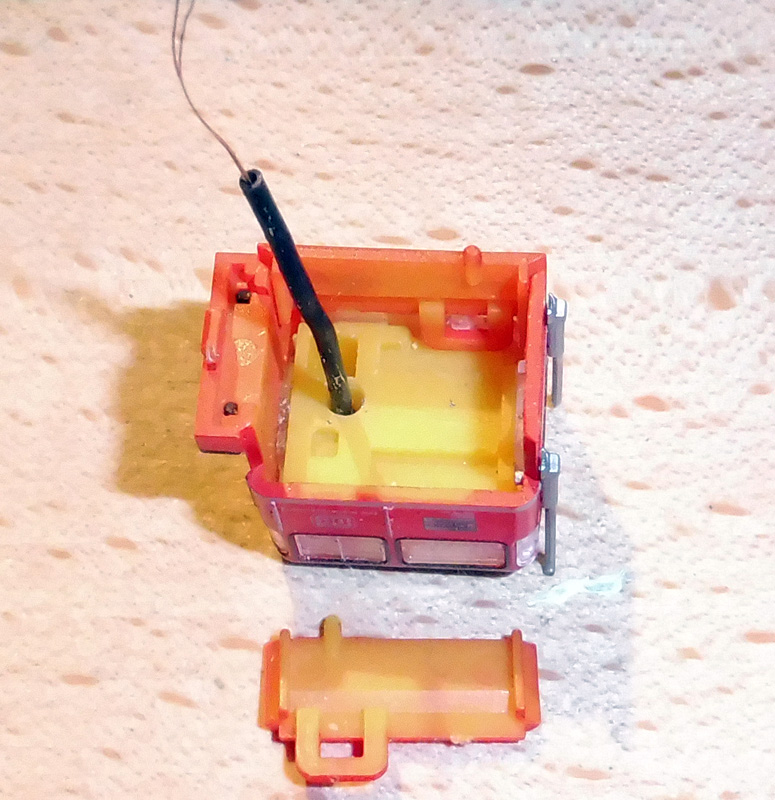
Sestavení modelu
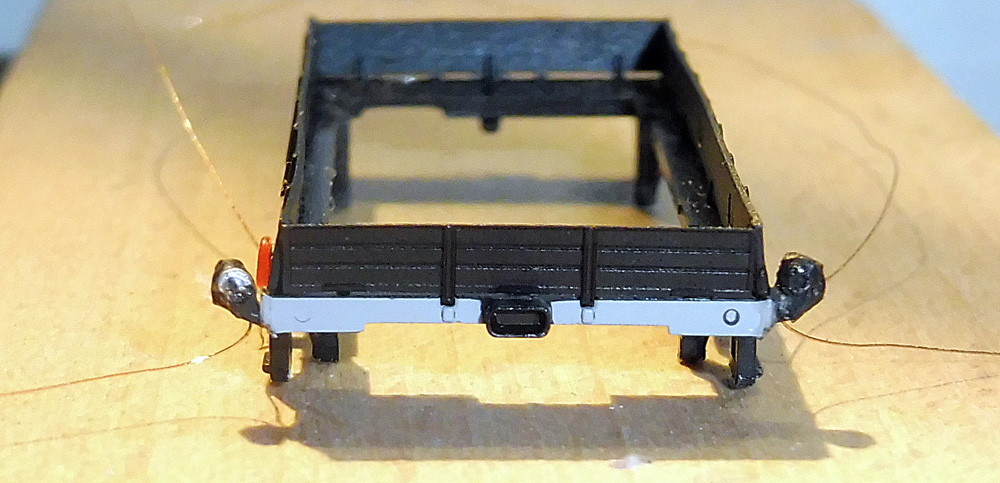
Při postupném oživování elektrických obvodů nezbylo než z rámu přívěsného vozíku sejmout plastový díl imitující podlahu vozíku s postranicemi. Jak už je u vedeno, na jeho zadní části zespodu jsou dvě koncová světla vybavená červenými LED SMD 0402. Drátky od nich jsem zapojil do série a vyvedl na předem připravené pájecí místo na DPS vzadu. Je tam i odpor (obr.).
Opětovné spojení tažného vozidla a přívěsu pomocí nerozebíratelného, ale otočného spřáhla, je činnost podobající se vložení lodního kotevního lana do ouška jehly. Nicméně, asi na dvacátý pokus se to podařilo. Vtip je v tom, že současně se musí na opačné straně přívěsu vložit i zadní spřáhlo, a ještě dávat pozor na nepřiskřípnutí vodičů. Uff.
Zkouška funkčnosti dopadla dobře.
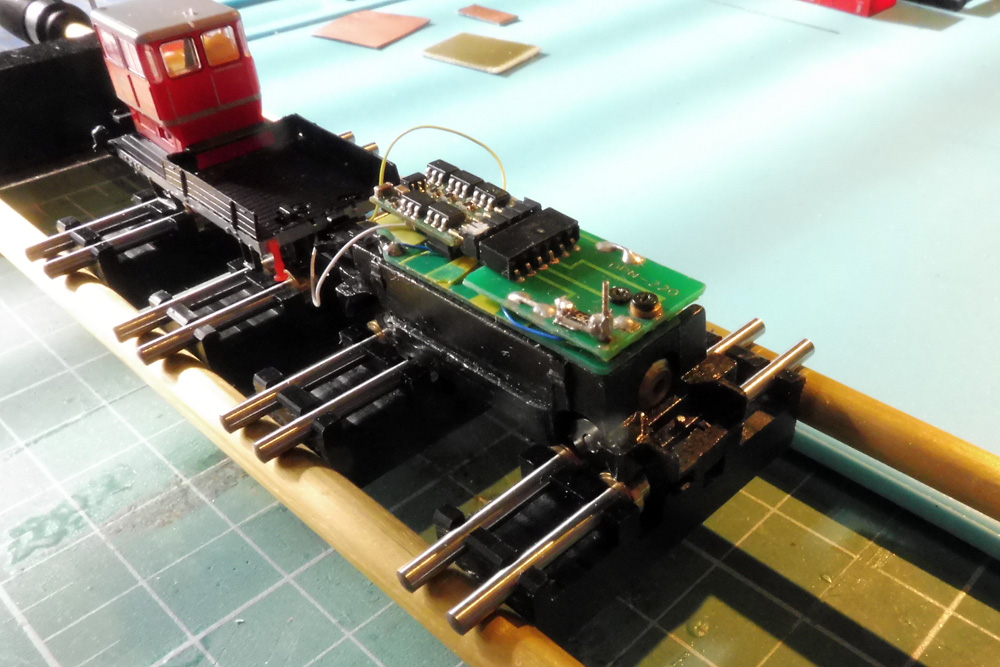 [20]
[20]
 [21]
[21]
Obr. 17, 18 – Zkouška funkčnosti sestavené soupravy KLV 35
.
Naprogramování dekodéru
Jak jsem naznačil, samostatnou kapitolou digitalizace každého modelu je správné naprogramování CVček. Jde o to, že když už si člověk dá práci s instalováním dekodéru, světel atd., tak by model měl blikat a jezdit tak, jak si přeje majitel, a ne dekodér. Někdy to je ale problém. Leč, nechme k tomu pojednat odborníka Honzu Plutnara:
Dekodér Kuehn N025 má celkem netradičně řešené a „rozmístěné“ nastavení ovládání funkčních výstupů. Dekodér má výstupy dva, z nichž pouze jeden (žlutý) lze namapovat na ovládání jinou funkcí než F0. Úkol zněl: Světla svítí bez ohledu na směr jízdy a dají se zapnout/vypnout. Stejně tak maják s tím, že k jeho ovládání bude sloužit jiná funkce než F0.
Pro správné nastavení dekodéru je třeba upravit hodnoty v CV 49, 50, 56 a 58. CV 49 a 50 nastavují dodatečné efekty pro funkční výstupy, CV 49 pro bílý a CV 50 pro žlutý. Protože poziční světla mají být na bílém výstupu a bez efektů, CV 49 bude mít hodnotu 0.
Pro efekt majáku na žlutém výstupu je třeba hodnota CV 50 = 2 (nebo 3, různě fázově posunuté blikání). 0. bit v hodnotě CV 56 určuje způsob, jakým se funkční výstupy chovají při přepínání směru. Při hodnotě 0 se při změně směru přepíná mezi žlutým a bílým výstupem, při hodnotě 1 jsou pak výstupy aktivní bez ohledu na směr jízdy a bílý výstup je ovládán F0, žlutý pak podle nastavení v CV 58. CV 58 přiřazuje ovládání žlutému výstupu, lze volit mezi F1 – F8 (nastavením 0. – 7. bitu). Pro ovládání funkcí F1 bude hodnota CV 58 = 1.
Rekapitulace – pro nastavení chování dekodéru podle zmíněných požadavků je třeba nastavit hodnoty CV způsobem uvedeným v tabulce:
| CV | Hodnota | Efekt |
| 49 | 0 | bílý výstup svítí při aktivaci trvale |
| 50 | 2 | žlutý výstup při sepnutí bliká |
| 56 | 1 | tlačítko F0 ovládá pouze bílý výstup* |
| 58 | 1 | žlutý výstup ovládá tlačítko F1 |
* za přepokladu, že je vypnutý režim posunu a kompenzace zátěže, jinak bude hodnota 3, 5 nebo 7
.
Jízdní vlastnosti modelu
Model s dekodérem nejezdil dobře. Rozjížděl se až na 10. – 14. jízdní stupeň (LENZ), a když se rozjel, tak při 28. stupni mazal jak Pendolino. Při kontrole „rychlostních“ CVček na programovací stolici ESU bylo zjištěno, že z výroby má dekodér N025 v těchto CV nastaveny hodnoty 0, 2 nebo 3. Podle všech mých učitelů programování dekodérů, na které jsem si vzpomněl, je ovládání maximální rychlosti modelu schováno v CV 5 (maximální rychlost), resp. CV 6 (tzv. střední rychlost). Činnost motoru, a tedy i jízdní vlastnosti modelu ale ovlivňují další CVčka, třeba CV 29, CV 50 a CV 67 až CV 94. Aby toho ale nebylo málo, nesmíme zapomenout na CV 2 (minimální rozjezdové napětí Vmin.) a také CV 9.
Právě na CV 2 jsem myslel nejdříve kvůli tomu rozjíždění motoru až na vyšší stupeň. Jenže, změna defaultně nastavené hodnoty (3) na hodnotu 5, 6, 7 nepomohla.
V CV 5 (maximální rychlost) lze nastavit hodnoty od 0 do 255 (totéž v CV 6). V CV 29 se ve 4. bitu volí nastavení tovární křivky rychlosti, nebo vlastní křivky rychlosti. Ale to je ještě závislé na definování hodnot v CV 67 – CV 94 (to už je ale vyhrazené jen modelářům s „vyšší programátorskou“).
Obvykle stačí zkušebně zvolit „nějakou“ hodnotu v CV 5 a zkontrolovat, jak se model chová při algoritmu čím bude vyšší hodnota v tomto CV, tím rychleji model pojede (samozřejmě v závislosti na instalovaném motoru a převodech). KLV 53 dosahuje v praxi maximální rychlost 70 km/hod. Prostřednictvím Fuldova „tacho“, kterých jsme v počátcích éry DIGI-CZ několik prototypů vyrobili – ZDE [22] -, jsem pro modelovou rychlost cca 70 km/hod. dospěl k hodnotě CV 5 = 142. V CV 6 jsem po zkoušení vizuálně nejlepších jízdních vlastností dospěl k hodnotě 132. Je to divné, ale je to tak. Model se ale stále nerozjede pod hodnotou 10. stupně. Třeba se ještě najde jiné a lepší řešení.
Doplnil bych ještě, že v CV 3 (rozjíždění) a CV 4 (zpomalování) jsem dal hodnoty 5.
Co se mi ale nechce líbit je, že postupem doby (jak si s modelem pořád jezdím tam a zpět) motor jakoby ztrácí na výkonu. Model jezdí pomaleji (měřeno na „tacho“). Možná odchází dekodér. Zatím ale nebudu malovat čerta na zeď…
Závěr
Další nedokončený „projekt z krabičky“ se mi podařilo vcelku úspěšně dokončit. Třeba se moje zkušenosti s relativně jednoduchou (ale piplavou) úpravou modelu KLV 53 může někomu hodit.
_________________________________
1) Wikipedie. In: https://de.wikipedia.org/wiki/DB-Baureihe_Klv_53
2) Christoph Schottler Maschinenfabrik GmbH, krátce SCHÖMA, je německý výrobce kolejových vozidel, se sídlem v Diepholz.
3) Pojem požívaný Martinem Pintou; viz např. Lokodekodéry 2. In: Lokopin – ZDE
4) Samozřejmě, efekt blikajícího světla „umi“ i řada dalších lokomotivních dekodérů, takže výběr toho správného dekodéru si musí každý rozhodnout sám. Popravdě, po zkušenostech bych už po N025 nesáhnul…
Foto hlav a neznámý autor (1 – 4)
.
3 Comments To "Digitalizace drážního vozidla KLV 53"
#1 Comment By Jitka Radimská On 15.5.2020 @ 07:35
Fakt dobrý! … že by další kostlivec ve skříni? A můžeme se těšit na další dobré rady z Honzíkovy krabičky?
JiR
#2 Comment By admin On 15.5.2020 @ 10:04
Děkuju za příspěvek do diskuse 🙂
Každá pochvala potěší.
Ale že najdu novou čtenářku HV právě ve vás, paní profesorko, na to bych si ještě někdy v únoru nevsadil 🙂
Hh
#3 Comment By JirkaV On 1.10.2023 @ 19:02
Před delší dobou se mi podařilo zakoupit „z druhé ruky“ tento model a chtěl bych poznamenat, že v mém případě mi stačilo osadit dekodér (také až na druhý pokus), nastavit CV 1 – 5 a dodnes jezdí bez problémů. Nechci se tím nijak chlubit, píši to jen jako informaci pro případné kupce tohoto modelu, že se není nutné při osazování dekodéru čehokoliv obávat, jak by mohlo vyplynout z textu článku. Já ovšem k podobným úpravám nenašel odvahu a model používám tak, jak to zamýšlel výrobce, pouze s výhledem na dekapitaci kabiny a její nahrazení leptem pro MUV69.